Hi, I'm Andrew!
Email LinkedIn Google Scholar
| Previous | Imitating Human Videos with VLM Captions, advised by Florian Shkurti and Shuang Li |
| On-Device AI, Machine Learning Systems at Qualcomm | |
| Task and Motion Planning, advised by Florian Shkurti at RVL | |
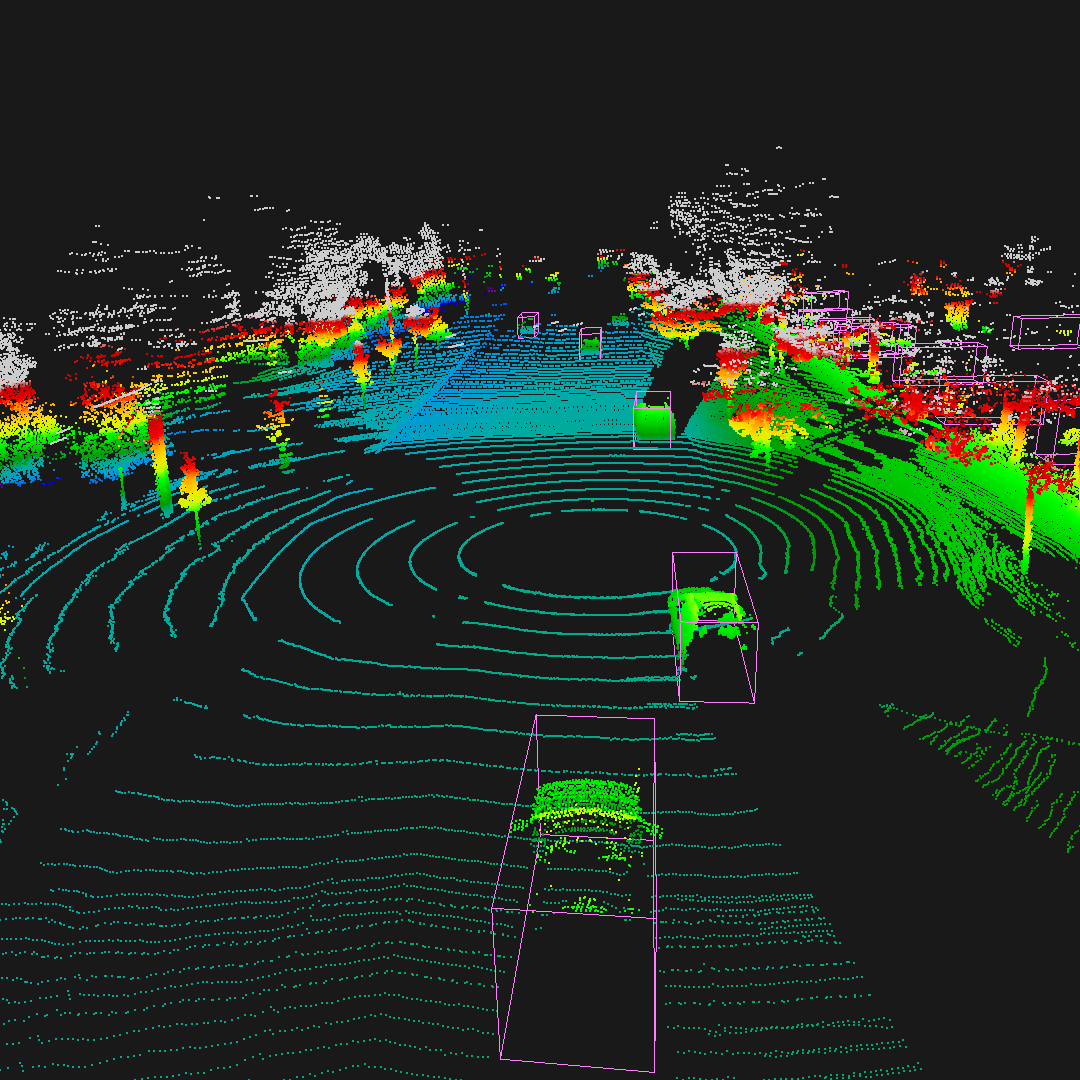
| Autonomous Driving Dataset, advised by Tim Barfoot at ASRL |
Publications
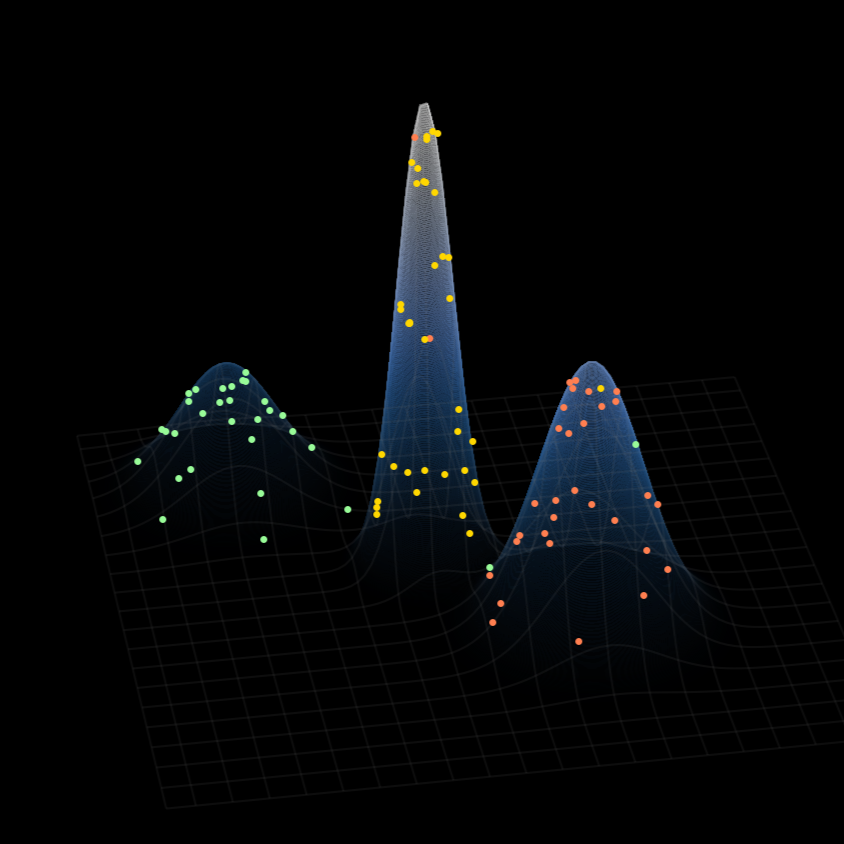
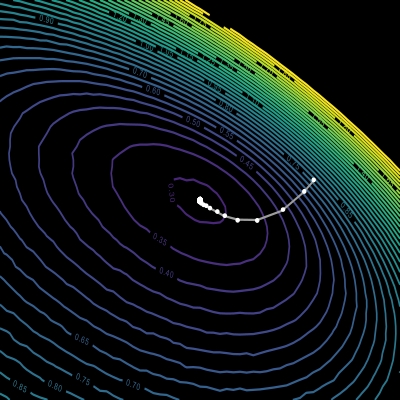
STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent
IEEE Robotics and Automation Letters, 2025

Chemistry Lab Automation via Constrained Task and Motion Planning
Large Language Models for Chemistry Robotics
arXiv, 2022
Large Language Models for Chemistry Robotics
Autonomous Robots, 2023
Projects

Arts
Outside of robotics, I enjoy music, photography, and design. Some of my favorite photos are in this [portfolio].
| 2018 | Associate Diploma (ARCT) in Piano Performance from the Royal Conservatory of Music |
| 2020 | Published in Canadian Geographic's Canadian Parks Calendar Series |
Palette: